
1. GIỚI THIỆU
1.1 Động cơ điện được sử dụng ở đâu?
Động cơ điện là thiết bị điện cơ học giúp chuyển điện năng thành cơ năng. Cơ năng này được sử dụng để, chẳng hạn, quay bánh công tác của bơm, quạt hoặc quạt đẩy, chạy máy nén, nâng vật liệu,vv… Các động cơ điện được sử dụng trong dân dụng (máy xay, khoan, quạt gió) và trong công nghiệp. Đôi khi động cơ điện được gọi là “sức ngựa” của ngành công nghiệp vì ước tính, động cơ sử dụng khoảng 70% của toàn bộ tải điện trong ngành công nghiệp.
1.2 Động cơ điện hoạt động như thế nào?
Cơ chế hoạt động chung ở tất cả các động cơ đều giống nhau:
- Dòng điện trong từ trường chịu tác dụng của một từ lực.
- Nếu dây dẫn được khép mạch, hai nhánh đối xứng của mạch sẽ chịu các lực tác dụng ngược chiều nhau (ngẫu lực) theo phương vuông góc với véc tơ đường sức từ.
- Ngẫu lực này tạo ra mô men làm quay cuộn dây.
- Các động cơ trên thực tế có một số mạch vòng trên phần ứng để tạo ra các mô men đồng đều và tạo ra từ trường nhờ sự sắp xếp hợp lý các nam châm điện, được gọi là các cuộn cảm.
Để hiểu rõ về động cơ, cần hiểu được tải động cơ là gì. Tải liên quan đến mô men đầu ra của động cơ ứng với tốc độ yêu cầu. Tải thường được phân thành ba nhóm:
- Tải mô men không đổi là tải yêu cầu công suất đầu ra có thể thay đổi cùng với tốc độ hoạt động nhưng momen quay không đổi. Băng tải, lò quay và các bơm pittông là những ví dụ điển hình của tải mô men không đổi.
- Tải mô men thay đổi là những tải mà mô men thay đổi khi tốc độ hoạt động thay đổi. Bơm ly tâm và quạt là những ví dụ điển hình của tải mô men thay đổi (mô men tỷ lệ bậc hai với tốc độ).
- Tải công suất không đổi là những tải mà các yêu cầu mô men thường thay đổi ngược với tốc độ. Những máy công cụ là ví dụ điển hình về tải công suất không đổi.
Các thành phần của động cơ điện thay đổi tuỳ theo các loại động cơ khác nhau, và sẽ được mô tả mỗi loại động cơ ở phần hai.
2. CÁC LOẠI ĐỘNG CƠ ĐIỆN
Phần này nói về hai loại động cơ điện chính: động cơ một chiều và động cơ xoay chiều.
Hình bên dưới cho thấy các loại động cơ điện phổ biến nhất. Các loai động cơ được phân loại dựa trên nguồn cung năng lượng, cấu trúc động cơ và cơ chế vận hành. Những vấn đề này sẽ được giải thích ở phần sau.

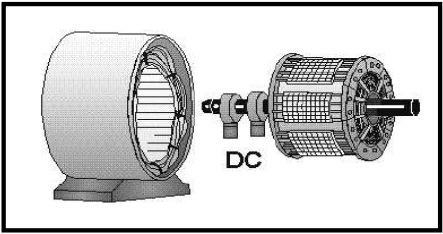
2.1 Động cơ một chiều
Động cơ một chiều, như tên gọi cho thấy, sử dụng dòng điện một chiều . Động cơ một chiều được sử dụng trong các ứng dụng đặc biệt yêu cầu mô men khởi động cao hoặc yêu cầu tăng tốc êm ở một dải tốc độ rộng.

Động cơ một chiều gồm ba thành phần chính sau:
- Cực từ. Tương tác giữa hai từ trường tạo ra sự quay trong động cơ một chiều. Động cơ một chiều có các cực từ đứng yên và phần ứng (đặt trên các ổ đỡ) quay trong không gian giữa các cực từ. Một động cơ một chiều đơn giản có hai cực từ: cực bắc và cực nam. Các đường sức từ chạy theo khoảng mở từ cực bắc tới cực nam. Với những động cơ phức tạp và lớn hơn, có một hoặc vài nam châm điện. Những nam châm này được cấp điện từ bên ngoài và đóng vai trò hình thành cấu trúc từ trường.
- Phần ứng. Khi có dòng điện đi qua, phần ứng sẽ trở thành một nam châm điện. Phần ứng, có dạng hình trụ, được nối với với trục ra để kéo tải. Với động cơ một chiều nhỏ, phần ứng quay trong từ trường do các cực tạo ra, cho đến khi cực bắc và cực nam của nam châm hoán đổi vị trí tương ứng với góc quay của phần ứng. Khi sự hoán đổi hoàn tất, dòng điện đảo chiều để xoay chiều các cực bắc và nam của phần ứng.
- Cổ góp. Bộ phận này thường có ở động cơ một chiều. Cổ góp có tác dụng đảo chiều của dòng điện trong phần ứng. Cổ góp cũng hỗ trợ sự truyền điện giữa phần ứng và nguồn điện.
Ưu điểm của động cơ một chiều là khả năng điều khiển tốc độ mà không làm ảnh hưởng tới chất lượng điện cung cấp. Có thể điều khiển động cơ loại này bằng cách điều chỉnh:
- Điện áp phần ứng – tăng điện áp phần ứng sẽ làm tăng tốc độ
- Dòng kích thích – Giảm dòng kích thích sẽ làm tăng tốc độ
Động cơ một chiều có nhiều loại khác nhau, nhưng những động cơ loại này thường được sử dụng giới hạn ở những thiết bị tốc độ chậm, công suất thấp đến trung bình như các máy công cụ và máy cán. Ở công suất lớn, động cơ một chiều có thể gặp trục trặc với các cổ góp cơ.
Các động cơ này cũng bị hạn chế chỉ sử dụng ở những khu vực sạch, không độc hại vì nguy cơ đánh lửa ở các chổi than. So với động cơ xoay chiều, động cơ một chiều cũng khá đắt.
Mối liên quan giữa tốc độ, từ thông và điện áp phần ứng được minh hoạ bằng phương trình sau:
 Với:
Với:
E = từ lực phản kháng ở phần ứng (vôn)
Φ = từ thông, tỷ lệ thuận với cường độ dòng điện
N = tốc độ quay, vòng/phút
T = mô men điện từ
Ia = dòng điện phần ứng
K = hằng số
2.1.1 Động cơ một chiều kích từ độc lập
Nếu dòng kích từ được cấp từ một nguồn riêng, thì đó là động cơ một chiều kích từ độc lập.
2.1.2 Động cơ một chiều tự kích:
Ở động cơ kích từ song song, cuộn kích từ (trường kích từ) được nối song song với cuộn dây phần ứng (A) như minh hoạ trong hình dưới. Vì vậy, dòng điện toàn phần của đường dây là tổng của dòng kích từ và dòng điện phần ứng.
 Dưới đây là một số đặc tính của tốc độ ở động cơ kích từ song song (E.T.E., 1997):
Dưới đây là một số đặc tính của tốc độ ở động cơ kích từ song song (E.T.E., 1997):
- Tốc độ động cơ trên thực tế là không đổi, không phụ thuộc vào tải (tới một mô men nhất định, sau đó tốc độ giảm, xem hình trên), nhờ vậy loại đông cơ này thích hợp với các ứng dụng với mô men khởi động thấp, như ở các máy công cụ.
- Có thể điều khiển tốc độ bằng cách lắp thêm điện trở nối tiếp với phần ứng (giảm tốc độ) hoặc lắp thêm điện trở nối tiếp với mạch kích từ (tăng tốc độ)
Ở động cơ nối tiếp, cuộn kích từ (trường kích từ) được nối nối tiếp với cuộn dây phản ứng (A) như minh hoạ trong hình dưới. Nhờ vậy, dòng kích từ sẽ bằng với dòng phần ứng. Dưới đây là một số đặc điểm tốc độ của động cơ nối tiếp (Rodwell International Corporation, 1997; L.M. Photonics Ltd, 2002):

- Tốc độ giới hạn ở 5000 vòng/phút
- Cần tránh vận hành động cơ nối tiếp ở chế độ không tải vì động cơ sẽ tăng tốc không thể kiểm soát được.
Động cơ nối tiếp phù hợp với những ứng dụng cần mô men khởi động lớn, như cần cẩu và tời.
Động cơ kích từ hỗn hợp một chiều là kết hợp của động cơ nối tiếp và động cơ kích từ song song. Ở động cơ kích từ hỗn hợp, cuộn kích từ (trường kích từ) được nối song song và nối tiếp với cuộn dây phần ứng (A) như minh hoạ trong hình dưới. Nhờ vậy, động cơ loại này có mô men khởi động tốt và tốc độ ổn định. Tỷ lệ phần trăm đấu hỗn hợp (tức là tỷ lệ phần trăm của cuộn kích từ được đấu nối tiếp) càng cao thì mô men khởi động của động cơ càng cao. Ví dụ động cơ có tỷ lệ đấu hỗn hợp là 40-50% thích hợp với tời và cần cẩu, còn động cơ kích từ hỗn hợp chuẩn (12%) lại không thích hợp với hai loại thiết bị này (myElectrical, 2005).

2.2 Động cơ xoay chiều
Động cơ xoay chiều (AC) sử dụng dòng điện đổi chiều theo chu kỳ. Một động cơ xoay chiều có hai phần điện cơ bản: một “stato” và một “rôto” như cho trong hình bên dưới. Stato là bộ phận đứng yên và rôto là bộ phận quay, làm quay trục của động cơ.
Ưu điểm chính của động cơ một chiều so với động cơ xoay chiều là dễ điều khiển tốc độ hơn động cơ xoay chiều. Bù lại, động cơ xoay chiều có thể được lắp thêm bộ điều khiển biến đổi tần số, tuy nhiên dù thiết bị này giúp cải thiện việc điều khiển tốc độ nhưng chất lượng điện lại giảm. Động cơ cảm ứng (còn gọi là động cơ không đồng bộ hoặc dị bộ) là động cơ phổ biến nhất trong công nghiệp vì sự chắc chắn và ít yêu cầu về bảo trì hơn. Động cơ cảm ứng xoay chiều rẻ tiền (chỉ bằng một nửa hoặc non nửa giá của động cơ một chiều cùng công suất) và có hệ số tỷ lệ công suất: trọng lượng cao (gấp đôi tỷ lệ công suất: trọng lượng của động cơ một chiều).
2.2.1 Động cơ đồng bộ
Động cơ đồng bộ là động cơ xoay chiều, hoạt động ở tốc độ không đổi xác định bởi tần số của hệ thống. Động cơ loại này cần có dòng điện một chiều (DC) để kích thích và có mô men khởi động thấp, vì vậy động cơ đồng bộ thích hợp với các thiết bị ứng dụng khởi động ở mức tải thấp như máy nén khí, tần số thay đổi hay máy phát điện. Động cơ đồng bộ có thể cải thiện hệ số công suất hệ thống, đây là lý do tại sao chúng thường hay được sử dụng với những hệ thống dùng nhiều điện.

Các thành phần chính của động cơ đồng bộ bao gồm:
- Rôto. Sự khác nhau chủ yếu giữa động cơ đồng bộ và không đồng bộ là rôto của động cơ đồng bộ quay với tốc độ bằng tốc độ của từ trường quay. Được như vậy là vì từ trường của rôto không còn tính cảm. Rôto có thể được lắp các nam châm vĩnh cửu hoặc các dòng kích từ một chiều bị giới hạn ở một vị trí nhất định khi xung đối với từ trường khác.
- Stato. Stato tạo ra từ trường quay tỷ lệ với tần số cung cấp.
Động cơ quay ở tốc độ đồng bộ, cho trong phương trình sau (Parekh, 2003):
 Trong đó:
Trong đó:
f = tần số của tần số cung cấp
P= số cực từ
2.2.2 Động cơ cảm ứng (không đồng bộ)
Động cơ không đồng bộ là động cơ rất thông dụng, được sử dụng cho các thiết bị khác nhau trong công nghiệp. Sở dĩ loại động cơ này thông dụng như vậy là vì chúng có thiết kế đơn giản, rẻ tiền và dễ bảo trì, có thể nối trực tiếp với nguồn xoay chiều.
Một động cơ không đồng bộ có hai bộ phận điện cơ bản (Hình bên dưới):
+ Rôto. Động cơ không đồng bộ sử dụng hai loại rôto:
- Rôto lồng sóc bao gồm những thanh dẫn dày đặt tại các rãnh song song. Đầu các thanh này được nối vào vòng đoản mạch.
- Một rôto quấn dây có ba pha, hai lớp, cuộn dây quấn. Rôto được quấn nhiều cực như là stato. Ba pha được nối dây bên trong và các đầu dây này được nối vào vành trượt treo trên một trục có các chổi than.
+ Stato. Stato được ghép từ các vòng dập định hình với các rãnh để chứa các cuộn dây ba pha. Chúng được quấn cho một số cực nhất định. Bố trí trong không gian của những cuộn dây này lệch nhau 120 độ.

Có thể phân động cơ không đồng bộ thành hai nhóm chính:
- Động cơ không đồng bộ một pha. Chỉ có một cuộn dây stato, hoạt động bằng nguồn điện một pha, có một rôto lồng sóc và cần một thiết bị để khởi động động cơ. Hiện nay, đây là loại động cơ phổ biến nhất sử dụng trong các thiết bị tại gia đình như quạt, máy giặt, máy sấy quần áo và có công suất trong khoảng 3 - 4 mã lực.
- Động cơ không đồng bộ ba pha. Từ trường quay do nguồn cung ba pha cân bằng sinh ra. Những động cơ loại này có năng lực công suất cao hơn, có thể có rôto lồng sóc hoặc rôto dây quấn (khoảng 90% là có rôto lồng sóc), và tự khởi động. Ước tính khoảng 70% động cơ trong công nghiệp thuộc loại này, chúng được sử dụng trong máy bơm, máy nén, băng tải, lưới điện công suất cao và máy mài. Chúng thích hợp trong dải từ 1/3 tới hàng trăm mã lực.
Tốc độ của động cơ không đồng bộ:
Động cơ không đồng bộ hoạt động như sau. Điện được cấp vào stato sinh ra từ trường quay. Từ trường chuyển động với tốc độ đồng bộ quanh rôto, tạo ra dòng điện trong rôto. Dòng điện trong rôto tạo ra từ trường thứ hai, có xu hướng chống lại từ trường stato và làm rôto quay.
Tuy nhiên, trên thực tế, động cơ không bao giờ chạy với tốc độ đồng bộ mà thường chạy ở mức thấp hơn “tốc độ cơ bản”. Sự chênh lệch giữa hai tốc độ này là “độ trượt”, độ trượt sẽ tăng khi tải tăng. Độ trượt chỉ xảy ra ở động cơ không đồng bộ. Để tránh hiện tượng này, có thể lắp vành trượt, những động cơ loại này gọi là “động cơ có vành trượt”. Phần trăm độ trượt được tính bằng phương trình sau (Parekh, 2003):
 Trong đó:
Trong đó:
Ns = tốc độ đồng bộ (tốc độ quay của từ trường) vòng/phút
Nb = tốc độ cơ của trục máy vòng/phút
Mối liên quan giữa tải, tốc độ và mô men quay
Hình dưới minh hoạ đường cong tốc độ của mô men điển hình ở động cơ không đồng bộ xoay chiều ba pha với đòng điện cố định. Khi động cơ:
- Khởi động: có một dòng khởi động cao và mô men thấp (“mô men kéo”).
- Đạt đến 80% tốc độ toàn phần, mô men đạt mức độ cao nhất (“mô men đẩy”) và dòng điện bắt đầu giảm.
- Ở tốc độ toàn phần, hoặc tốc độ đồng bộ, mô men và dòng của stato giảm về 0.

1.1 Động cơ điện được sử dụng ở đâu?
Động cơ điện là thiết bị điện cơ học giúp chuyển điện năng thành cơ năng. Cơ năng này được sử dụng để, chẳng hạn, quay bánh công tác của bơm, quạt hoặc quạt đẩy, chạy máy nén, nâng vật liệu,vv… Các động cơ điện được sử dụng trong dân dụng (máy xay, khoan, quạt gió) và trong công nghiệp. Đôi khi động cơ điện được gọi là “sức ngựa” của ngành công nghiệp vì ước tính, động cơ sử dụng khoảng 70% của toàn bộ tải điện trong ngành công nghiệp.
1.2 Động cơ điện hoạt động như thế nào?
Cơ chế hoạt động chung ở tất cả các động cơ đều giống nhau:
- Dòng điện trong từ trường chịu tác dụng của một từ lực.
- Nếu dây dẫn được khép mạch, hai nhánh đối xứng của mạch sẽ chịu các lực tác dụng ngược chiều nhau (ngẫu lực) theo phương vuông góc với véc tơ đường sức từ.
- Ngẫu lực này tạo ra mô men làm quay cuộn dây.
- Các động cơ trên thực tế có một số mạch vòng trên phần ứng để tạo ra các mô men đồng đều và tạo ra từ trường nhờ sự sắp xếp hợp lý các nam châm điện, được gọi là các cuộn cảm.
Để hiểu rõ về động cơ, cần hiểu được tải động cơ là gì. Tải liên quan đến mô men đầu ra của động cơ ứng với tốc độ yêu cầu. Tải thường được phân thành ba nhóm:
- Tải mô men không đổi là tải yêu cầu công suất đầu ra có thể thay đổi cùng với tốc độ hoạt động nhưng momen quay không đổi. Băng tải, lò quay và các bơm pittông là những ví dụ điển hình của tải mô men không đổi.
- Tải mô men thay đổi là những tải mà mô men thay đổi khi tốc độ hoạt động thay đổi. Bơm ly tâm và quạt là những ví dụ điển hình của tải mô men thay đổi (mô men tỷ lệ bậc hai với tốc độ).
- Tải công suất không đổi là những tải mà các yêu cầu mô men thường thay đổi ngược với tốc độ. Những máy công cụ là ví dụ điển hình về tải công suất không đổi.
Các thành phần của động cơ điện thay đổi tuỳ theo các loại động cơ khác nhau, và sẽ được mô tả mỗi loại động cơ ở phần hai.
2. CÁC LOẠI ĐỘNG CƠ ĐIỆN
Phần này nói về hai loại động cơ điện chính: động cơ một chiều và động cơ xoay chiều.
Hình bên dưới cho thấy các loại động cơ điện phổ biến nhất. Các loai động cơ được phân loại dựa trên nguồn cung năng lượng, cấu trúc động cơ và cơ chế vận hành. Những vấn đề này sẽ được giải thích ở phần sau.

2.1 Động cơ một chiều
Động cơ một chiều, như tên gọi cho thấy, sử dụng dòng điện một chiều . Động cơ một chiều được sử dụng trong các ứng dụng đặc biệt yêu cầu mô men khởi động cao hoặc yêu cầu tăng tốc êm ở một dải tốc độ rộng.

Động cơ một chiều gồm ba thành phần chính sau:
- Cực từ. Tương tác giữa hai từ trường tạo ra sự quay trong động cơ một chiều. Động cơ một chiều có các cực từ đứng yên và phần ứng (đặt trên các ổ đỡ) quay trong không gian giữa các cực từ. Một động cơ một chiều đơn giản có hai cực từ: cực bắc và cực nam. Các đường sức từ chạy theo khoảng mở từ cực bắc tới cực nam. Với những động cơ phức tạp và lớn hơn, có một hoặc vài nam châm điện. Những nam châm này được cấp điện từ bên ngoài và đóng vai trò hình thành cấu trúc từ trường.
- Phần ứng. Khi có dòng điện đi qua, phần ứng sẽ trở thành một nam châm điện. Phần ứng, có dạng hình trụ, được nối với với trục ra để kéo tải. Với động cơ một chiều nhỏ, phần ứng quay trong từ trường do các cực tạo ra, cho đến khi cực bắc và cực nam của nam châm hoán đổi vị trí tương ứng với góc quay của phần ứng. Khi sự hoán đổi hoàn tất, dòng điện đảo chiều để xoay chiều các cực bắc và nam của phần ứng.
- Cổ góp. Bộ phận này thường có ở động cơ một chiều. Cổ góp có tác dụng đảo chiều của dòng điện trong phần ứng. Cổ góp cũng hỗ trợ sự truyền điện giữa phần ứng và nguồn điện.
Ưu điểm của động cơ một chiều là khả năng điều khiển tốc độ mà không làm ảnh hưởng tới chất lượng điện cung cấp. Có thể điều khiển động cơ loại này bằng cách điều chỉnh:
- Điện áp phần ứng – tăng điện áp phần ứng sẽ làm tăng tốc độ
- Dòng kích thích – Giảm dòng kích thích sẽ làm tăng tốc độ
Động cơ một chiều có nhiều loại khác nhau, nhưng những động cơ loại này thường được sử dụng giới hạn ở những thiết bị tốc độ chậm, công suất thấp đến trung bình như các máy công cụ và máy cán. Ở công suất lớn, động cơ một chiều có thể gặp trục trặc với các cổ góp cơ.
Các động cơ này cũng bị hạn chế chỉ sử dụng ở những khu vực sạch, không độc hại vì nguy cơ đánh lửa ở các chổi than. So với động cơ xoay chiều, động cơ một chiều cũng khá đắt.
Mối liên quan giữa tốc độ, từ thông và điện áp phần ứng được minh hoạ bằng phương trình sau:
E = từ lực phản kháng ở phần ứng (vôn)
Φ = từ thông, tỷ lệ thuận với cường độ dòng điện
N = tốc độ quay, vòng/phút
T = mô men điện từ
Ia = dòng điện phần ứng
K = hằng số
2.1.1 Động cơ một chiều kích từ độc lập
Nếu dòng kích từ được cấp từ một nguồn riêng, thì đó là động cơ một chiều kích từ độc lập.
2.1.2 Động cơ một chiều tự kích:
Ở động cơ kích từ song song, cuộn kích từ (trường kích từ) được nối song song với cuộn dây phần ứng (A) như minh hoạ trong hình dưới. Vì vậy, dòng điện toàn phần của đường dây là tổng của dòng kích từ và dòng điện phần ứng.

- Tốc độ động cơ trên thực tế là không đổi, không phụ thuộc vào tải (tới một mô men nhất định, sau đó tốc độ giảm, xem hình trên), nhờ vậy loại đông cơ này thích hợp với các ứng dụng với mô men khởi động thấp, như ở các máy công cụ.
- Có thể điều khiển tốc độ bằng cách lắp thêm điện trở nối tiếp với phần ứng (giảm tốc độ) hoặc lắp thêm điện trở nối tiếp với mạch kích từ (tăng tốc độ)
Ở động cơ nối tiếp, cuộn kích từ (trường kích từ) được nối nối tiếp với cuộn dây phản ứng (A) như minh hoạ trong hình dưới. Nhờ vậy, dòng kích từ sẽ bằng với dòng phần ứng. Dưới đây là một số đặc điểm tốc độ của động cơ nối tiếp (Rodwell International Corporation, 1997; L.M. Photonics Ltd, 2002):

- Tốc độ giới hạn ở 5000 vòng/phút
- Cần tránh vận hành động cơ nối tiếp ở chế độ không tải vì động cơ sẽ tăng tốc không thể kiểm soát được.
Động cơ nối tiếp phù hợp với những ứng dụng cần mô men khởi động lớn, như cần cẩu và tời.
Động cơ kích từ hỗn hợp một chiều là kết hợp của động cơ nối tiếp và động cơ kích từ song song. Ở động cơ kích từ hỗn hợp, cuộn kích từ (trường kích từ) được nối song song và nối tiếp với cuộn dây phần ứng (A) như minh hoạ trong hình dưới. Nhờ vậy, động cơ loại này có mô men khởi động tốt và tốc độ ổn định. Tỷ lệ phần trăm đấu hỗn hợp (tức là tỷ lệ phần trăm của cuộn kích từ được đấu nối tiếp) càng cao thì mô men khởi động của động cơ càng cao. Ví dụ động cơ có tỷ lệ đấu hỗn hợp là 40-50% thích hợp với tời và cần cẩu, còn động cơ kích từ hỗn hợp chuẩn (12%) lại không thích hợp với hai loại thiết bị này (myElectrical, 2005).

2.2 Động cơ xoay chiều
Động cơ xoay chiều (AC) sử dụng dòng điện đổi chiều theo chu kỳ. Một động cơ xoay chiều có hai phần điện cơ bản: một “stato” và một “rôto” như cho trong hình bên dưới. Stato là bộ phận đứng yên và rôto là bộ phận quay, làm quay trục của động cơ.
Ưu điểm chính của động cơ một chiều so với động cơ xoay chiều là dễ điều khiển tốc độ hơn động cơ xoay chiều. Bù lại, động cơ xoay chiều có thể được lắp thêm bộ điều khiển biến đổi tần số, tuy nhiên dù thiết bị này giúp cải thiện việc điều khiển tốc độ nhưng chất lượng điện lại giảm. Động cơ cảm ứng (còn gọi là động cơ không đồng bộ hoặc dị bộ) là động cơ phổ biến nhất trong công nghiệp vì sự chắc chắn và ít yêu cầu về bảo trì hơn. Động cơ cảm ứng xoay chiều rẻ tiền (chỉ bằng một nửa hoặc non nửa giá của động cơ một chiều cùng công suất) và có hệ số tỷ lệ công suất: trọng lượng cao (gấp đôi tỷ lệ công suất: trọng lượng của động cơ một chiều).
2.2.1 Động cơ đồng bộ
Động cơ đồng bộ là động cơ xoay chiều, hoạt động ở tốc độ không đổi xác định bởi tần số của hệ thống. Động cơ loại này cần có dòng điện một chiều (DC) để kích thích và có mô men khởi động thấp, vì vậy động cơ đồng bộ thích hợp với các thiết bị ứng dụng khởi động ở mức tải thấp như máy nén khí, tần số thay đổi hay máy phát điện. Động cơ đồng bộ có thể cải thiện hệ số công suất hệ thống, đây là lý do tại sao chúng thường hay được sử dụng với những hệ thống dùng nhiều điện.
Các thành phần chính của động cơ đồng bộ bao gồm:
- Rôto. Sự khác nhau chủ yếu giữa động cơ đồng bộ và không đồng bộ là rôto của động cơ đồng bộ quay với tốc độ bằng tốc độ của từ trường quay. Được như vậy là vì từ trường của rôto không còn tính cảm. Rôto có thể được lắp các nam châm vĩnh cửu hoặc các dòng kích từ một chiều bị giới hạn ở một vị trí nhất định khi xung đối với từ trường khác.
- Stato. Stato tạo ra từ trường quay tỷ lệ với tần số cung cấp.
Động cơ quay ở tốc độ đồng bộ, cho trong phương trình sau (Parekh, 2003):
f = tần số của tần số cung cấp
P= số cực từ
2.2.2 Động cơ cảm ứng (không đồng bộ)
Động cơ không đồng bộ là động cơ rất thông dụng, được sử dụng cho các thiết bị khác nhau trong công nghiệp. Sở dĩ loại động cơ này thông dụng như vậy là vì chúng có thiết kế đơn giản, rẻ tiền và dễ bảo trì, có thể nối trực tiếp với nguồn xoay chiều.
Một động cơ không đồng bộ có hai bộ phận điện cơ bản (Hình bên dưới):
+ Rôto. Động cơ không đồng bộ sử dụng hai loại rôto:
- Rôto lồng sóc bao gồm những thanh dẫn dày đặt tại các rãnh song song. Đầu các thanh này được nối vào vòng đoản mạch.
- Một rôto quấn dây có ba pha, hai lớp, cuộn dây quấn. Rôto được quấn nhiều cực như là stato. Ba pha được nối dây bên trong và các đầu dây này được nối vào vành trượt treo trên một trục có các chổi than.
+ Stato. Stato được ghép từ các vòng dập định hình với các rãnh để chứa các cuộn dây ba pha. Chúng được quấn cho một số cực nhất định. Bố trí trong không gian của những cuộn dây này lệch nhau 120 độ.

Có thể phân động cơ không đồng bộ thành hai nhóm chính:
- Động cơ không đồng bộ một pha. Chỉ có một cuộn dây stato, hoạt động bằng nguồn điện một pha, có một rôto lồng sóc và cần một thiết bị để khởi động động cơ. Hiện nay, đây là loại động cơ phổ biến nhất sử dụng trong các thiết bị tại gia đình như quạt, máy giặt, máy sấy quần áo và có công suất trong khoảng 3 - 4 mã lực.
- Động cơ không đồng bộ ba pha. Từ trường quay do nguồn cung ba pha cân bằng sinh ra. Những động cơ loại này có năng lực công suất cao hơn, có thể có rôto lồng sóc hoặc rôto dây quấn (khoảng 90% là có rôto lồng sóc), và tự khởi động. Ước tính khoảng 70% động cơ trong công nghiệp thuộc loại này, chúng được sử dụng trong máy bơm, máy nén, băng tải, lưới điện công suất cao và máy mài. Chúng thích hợp trong dải từ 1/3 tới hàng trăm mã lực.
Tốc độ của động cơ không đồng bộ:
Động cơ không đồng bộ hoạt động như sau. Điện được cấp vào stato sinh ra từ trường quay. Từ trường chuyển động với tốc độ đồng bộ quanh rôto, tạo ra dòng điện trong rôto. Dòng điện trong rôto tạo ra từ trường thứ hai, có xu hướng chống lại từ trường stato và làm rôto quay.
Tuy nhiên, trên thực tế, động cơ không bao giờ chạy với tốc độ đồng bộ mà thường chạy ở mức thấp hơn “tốc độ cơ bản”. Sự chênh lệch giữa hai tốc độ này là “độ trượt”, độ trượt sẽ tăng khi tải tăng. Độ trượt chỉ xảy ra ở động cơ không đồng bộ. Để tránh hiện tượng này, có thể lắp vành trượt, những động cơ loại này gọi là “động cơ có vành trượt”. Phần trăm độ trượt được tính bằng phương trình sau (Parekh, 2003):
Ns = tốc độ đồng bộ (tốc độ quay của từ trường) vòng/phút
Nb = tốc độ cơ của trục máy vòng/phút
Mối liên quan giữa tải, tốc độ và mô men quay
Hình dưới minh hoạ đường cong tốc độ của mô men điển hình ở động cơ không đồng bộ xoay chiều ba pha với đòng điện cố định. Khi động cơ:
- Khởi động: có một dòng khởi động cao và mô men thấp (“mô men kéo”).
- Đạt đến 80% tốc độ toàn phần, mô men đạt mức độ cao nhất (“mô men đẩy”) và dòng điện bắt đầu giảm.
- Ở tốc độ toàn phần, hoặc tốc độ đồng bộ, mô men và dòng của stato giảm về 0.

Đường cong tốc độ-mômen quay của động cơ cảm ứng xoay chiều 3 pha (Parekh, 2003)
Nguồn bài viết: Chương trình môi trường liên hợp quốc (năm 2006) UNEP -
Hướng dẫn Sử dụng năng lượng hiệu quả trong ngành công nghiệp Châu Á











0 Comments: