
Cấu tạo
Động cơ điện không đồng bộ - Asynchronous motor hay còn gọi là Động cơ cảm ứng - Induction motor (sẽ nói đến vì sao ở phần dưới bài viết) về kết cấu chia làm hai loại : động cơ điện không đồng bộ rôto lồng sóc và động cơ điện rôto dây quấn, stato của 2 loại dây quấn này như nhau. Stato bao gồm các lá thép kĩ thuật điện ghép lại, giữa các lá thép được cách điện để hạn chế dòng điện Phuco. Chức năng của lõi thép là dẫn từ và là nơi để lấy chỗ dựa cho dây quấn, vì vậy yêu cầu của lõi thép là phải dẫn từ tốt, tổn hao sắt từ nhỏ và có kết cấu chắc chắn. Trên bề mặt trong của lõi thép có các rãnh để chứa dây quấn.

Động cơ điện không đồng bộ rôto lồng sóc.
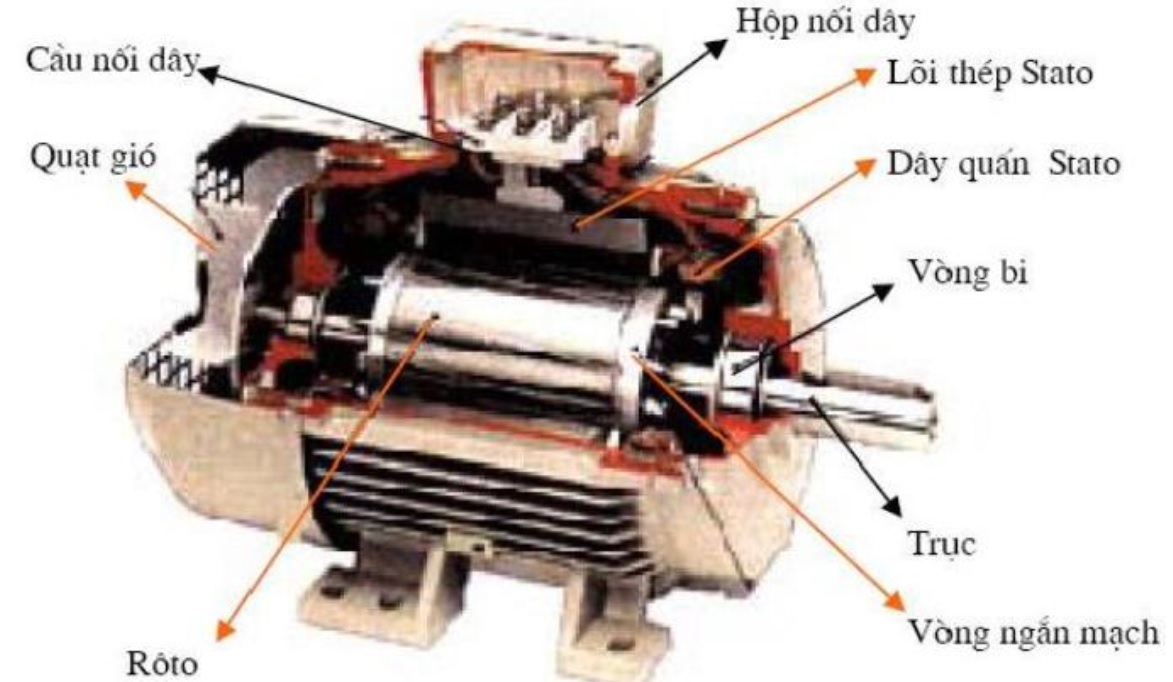
Cấu tạo của động cơ không đồng bộ
Dây quấn được cách điện với lõi thép bằng vật liệu cách điện. Dây quấn của động cơ được nghiên cứu ở mục sau. Đầu ra của dây quấn được nối ra các hộp cực ở vỏ máy theo quy luật như hình dưới.

Các đầu ra của dây quấn và cách chuyển cầu nối dây
để có được nối hình sao Y hay tam giác.
Đối với các động cơ không đồng bộ công suất không lớn (đến hàng kW) nắp máy đồng thời là gối đỡ trục, nắp máy được chế tạo bằng gang hay thép. Nắp máy được lắp ghép với thân máy qua gờ lắp thân, mối lắp ghép này cùng với ổ bi xác định vị trí của rôto so với stato. Đây là mối lắp ghép quan trọng quyết định sự làm việc ổn định và lâu dài của động cơ.để có được nối hình sao Y hay tam giác.
Roto của động cơ không đồng bộ bao gồm lõi thép, dây quấn và trục. Đối với động cơ dây quấn còn có các vành trượt gắn trên truc. Lõi thép của rôto do các lá thép kĩ thuật điện ghép lại. Điểm khác với stato là giữa các lá thép không có cách điện, vì tần số làm việc ở rôto rất thấp, chỉ vài Hz, nên tổn hao do dòng Phuco trong lõi rôto rất thấp. Ở mặt ngoài rôto có xẻ các rãnh để chứa dây quấn.
Dây quấn roto có hai loại: Dây quấn ngắn mạch hay còn goi là dây quấn lồng sóc và dây quấn pha tương tự như dây quan stato.
Dây quấn lồng sóc thường được đúc bằng nhôm, các đầu thanh nhôm ở 2 phía được đúc ngắn mạch, tạo thành vành ngắn mạch và có các cánh để quạt thông gió khi Roto quay. Ngoài ra rôto lồng sóc được chế tạo từ đồng hợp kim, có điện trở suất cao, nhằm mục đích nâng cao mô men mở máy. Roto thanh đồng có độ tin cậy cao, tránh được hiện tượng rỗ do đúc. Rôto thanh đồng ít dùng, vì khó chế tạo và giá thành cao.

Rôto dây quấn là trên rôto quấn các cuộn dây tương tự như stato, như: số cực 2P, số pha. Dây quấn rôto thường nối thành hình sao, 3 đầu dây ra của 3 pha được đưa ra 3 vành trượt đặt trên trục. Các vành trượt được cách điện với nhau và cách điện với trục. Thông qua các vành trượt, người ta đưa điện vào rôto qua điện trở phụ, để hạn chế dòng điện mở máy và điều chỉnh tốc độ quay của động cơ.
Việc sửa chữa dây quấn rôto hoàn toàn tương tự như dây quấn stato.
Trục máy được chế tạo từ thép các bon. Việc chế tạo trục khá đơn giản, trên trục có gắn lõi thép rôto, dây quấn, vành trượt và quạt gió, vì vậy trục là một chi tiết quan trọng của động cơ.
Nguyên lí làm việc của động điện không đồng bộ
Khi đưa điện vào dây quấn 3 pha, trong dây quấn có các dòng điện. Hệ thống dòng điện này tạo ra từ trường quay với tốc độ :
 (2-4)
(2-4)P: Số đối cực
Từ trường quay của stato, cảm ứng trong dây quấn rôto sức điện động E (chiều sức điện động xác định theo quy tắc bàn tay phải), vì dây quấn rôto nối ngắn mạch, nên trên thanh dẫn rôto hình thành dòng điện lớn. Sự tác dụng tương hỗ giữa dòng điện của rôto với từ trường của stato, tạo ra các lực điện từ tác dụng lên thanh dẫn theo phương tiếp tuyến với bề mặt rôto, tạo ra mô men, làm cho rôto quay. Chiều quay của rôto theo chiều quay của từ trường được minh họa như hình bên dưới.

Nguyên lí làm việc của động cơ không đồng bộ.
Ta thấy lực tác dụng có xu hướng quay rôto theo chiều quay của từ trường. Như vậy chiều quay của rôto phụ thuộc vào thứ tự pha của điện áp lưới điện, đặt lên dây quấn stato.
Tốc độ của rôto n2, được goi là tốc độ làm việc và luôn nhỏ hơn tốc độ quay của từ trường. Vì nếu tốc độ quay của rôto bằng tốc độ của từ trường, có thể xem cuộn dây của rôto và từ trường đứng yên, nên không xảy ra hiện tượng cảm ứng điện từ trên cuộn dây rôto. Vì vậy, chỉ trong trường hợp tốc độ quay của rôto nhỏ hơn tốc độ quay của từ trường mới xảy ra sự cảm ứng sức điện động trong dây quấn rôto.
Hiệu số tốc độ quay của từ trường stato và rôto được đặc trưng bằng một đại lượng gọi là hệ số trượt s:
 (2-5)
(2-5)
Hệ số trượt của động cơ không đồng bộ có trị số nằm trong khoảng từ 0 ~1, khi s = 0 tốc độ rôto bằng tốc độ từ trường, ở chế độ này gọi là chế độ không tải lí tưởng. Khi hệ số trượt s =1, rôto đứng yên (n2= 0) mô men trên trục bằng mô men mở máy. Khi động cơ quay ở tải định mức, có hệ số trượt định mức, tương ứng có tốc độ quay của rôto định mức. Hệ số trượt định mức nằm trong khoảng 0,01 ~ 0,06.
Từ công thức 2-5 có thể tính được tốc độ quay của động cơ không đồng bộ bằng :
 (2-6)
(2-6) = 1440 vòng/phút, ta hiểu ngay tốc độ đồng bộ n = 1500 vòng/phút, số đôi cực P =3000/1500 = 2,
= 1440 vòng/phút, ta hiểu ngay tốc độ đồng bộ n = 1500 vòng/phút, số đôi cực P =3000/1500 = 2, hệ số trượt s=100.(n1-n2)/n1= 100(1500-1440)/1500=4%
Một số đặc điểm của động cơ không đồng bộ
a) Đặc điểm quan trọng của động cơ không đồng bộ là dây quấn rôto không được nối trực tiếp với lưới điện, vì vậy sức điện động và dòng điện có được trong rôto là do cảm ứng, chính vì vậy người ta gọi động cơ loại này là động cơ cảm ứng.
Tần số của dòng điện trong rôto rất nhỏ, nó phụ thuộc vào hệ số trượt s của rôto với từ trường stato, tức là phụ thuộc vào hiệu số n1 - n2 :

f2 tần số của rôto
P: số đôi cực của đong cơ
n1 : tốc độ quay của từ trường
n2 tốc độ quay của rôto.
Từ 2-4 có thể tính f2 theo hệ số trượt ta có :

Ví dụ: Với hệ số trượt s = 0,04, tần số của dòng điện rôto bằng :
f2 = sf1 = 0,04.50= 2Hz
Dòng điện rôto tạo ra sức từ động rôto quay với tốc độ ns so với rôto :

b) Động cơ không đồng bộ có thể làm việc ở chế độ máy phát điện. Nếu ta dùng một động cơ khác kéo động cơ không đồng bộ quay với tốc độ lớn hơn tốc độ đồng bộ và các đầu ra của động cơ được nối với lưới điện. Động cơ không đồng bộ cũng có thể trở thành máy phát điện độc lập nếu ở đầu ra của động cơ được kích từ bằng các tụ điện. Máy phát điện không đồng bộ làm việc không ổn định nên ít được sử dụng.
c) Động cơ không đồng bộ có thể làm việc ở chế độ 1 pha. Về mặt kết cấu, động cơ điện không đồng bộ 1 pha không khác mấy so với động cơ không đồng bộ 3 pha. Điều khác biệt là động cơ không đồng bộ 1 pha không tự mở máy được, do đó trên dây quấn stato có quấn thêm dây quấn khởi động và dây quấn này nối với các phần tử như tụ điện hoặc điện trở để tạo mômen khởi động cho động cơ.











0 Comments: